(2) Backlash is measured at 2% of nominal output torque T 2N
(3) Applied to the output shaft centre at 100 RPM.
(4) The dB Values are measured by gearbox with ratio = 10 (1-stage) or ratio = 100 (2-stage) without loading at 3,000 rpm or at the nominal input speed n 1N.
(5) For continuous operation, the service lifetime is less than 10,000 hours.
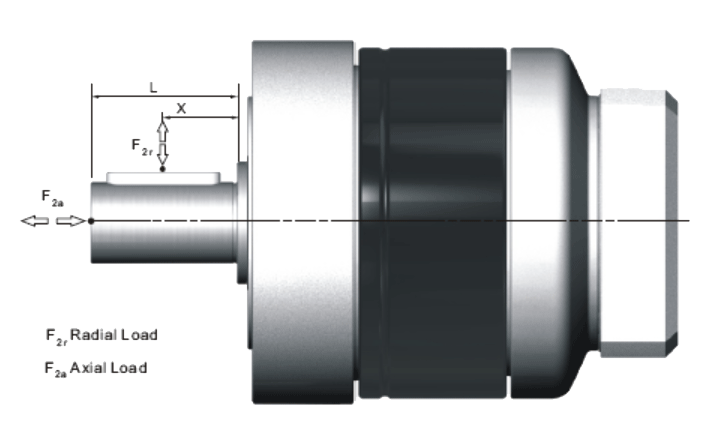
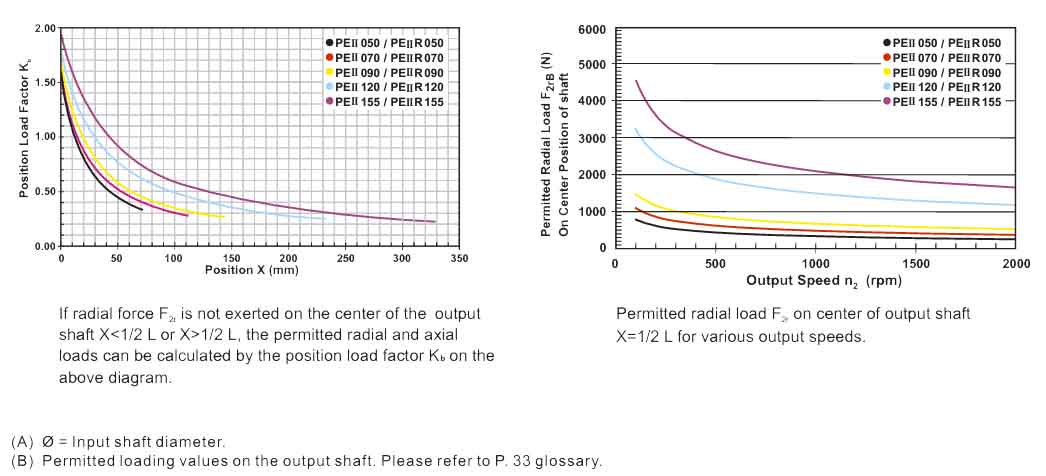
Permitted Radial And Axial Loads On Output Shaft
The permitted radial and Axial loads on the output of the gearbox depend on the design of the gearbox supporting bearings.
if Radial force F is not exerted on the centre of the output shaft X <1/2xL or X> 1/2xL, t
hen the permitted radial and axial loads can be calculated by the position load factor Kb on the above diagrams.
Permitted radial load F on the centre of the output shaft X= 1/2 X L for various output speeds.
Values provided are for 20,000 hours of life.
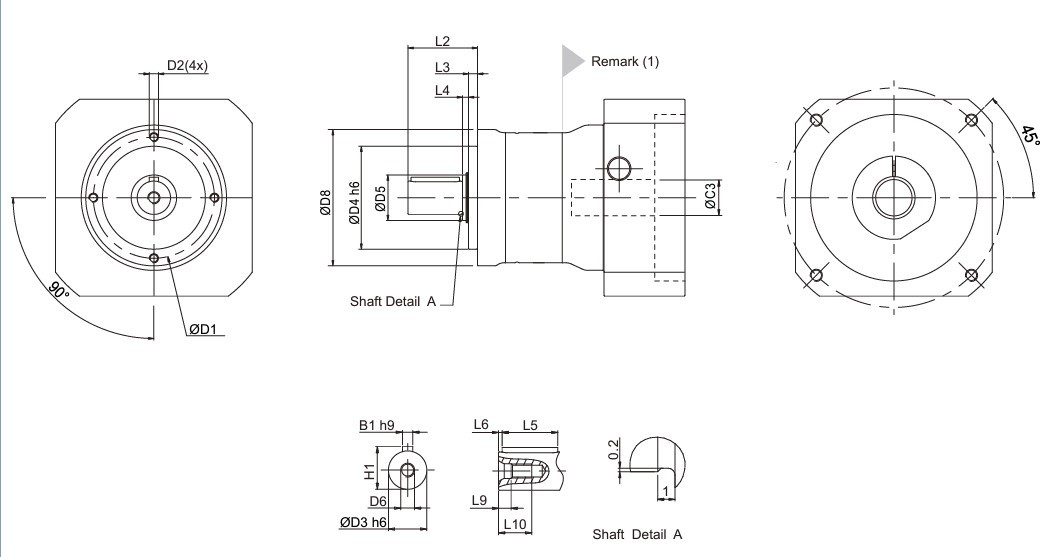
Dimension
PEII 050
PEII 070
PEII 090
PEII 120
PEII 155
1-st
2-st
1-st
2-st
1-st
2-st
1-st
2-st
1-st
2-st
D1
44
62
80
108
140
D2
M4X9
M5X10
M6X12
M8X15
M10X18
D3 h6
12
16
22
32
40
D4 h7
35
52
68
90
120
D5
17
22
30
40
55
D6
M4X0.7P
M5X0.8P
M8X1.25P
M12X1.75P
M16X2P
D8
50
70
90
120
155
L2
24.5
36
46
70
97
L3
4
4.5
6
7
9.5
L4
2.5
3.5
4
5
5.5
L5
14
25
32
50
70
L6
2
2
2
4
6
L9
4.5
4.8
7.2
10
12
L10
10
12.5
19
28
36
B1 h9
4
5
6
10
12
H1
13.5
18
24.5
36
43
(1) Dimensions are related to the motor interface.