Capitan
High Efficiency, High Power Density Servo Drives
Summit Series
10A | 8-60VDC | 99% Efficiency
CAPITAN SMART SERVO DRIVE
The Capitan servo drives are ultra compact, high-power density, and super efficient. They are designed for the most demanding motion control applications. An extremely low profile and lightweight design, allows for easy integration in compact robotic joints, flat actuators, end-effectors, surgical robots, exoskeletons, gimbals, and haptic applications.
Designed with the most advanced transistor technology in the world, The Capitan servo drives experience the highest power density and efficiency. Communications latency has been optimised to maximise system responsiveness. Standby power consumption has been reduced to minimise heat generation, and firmware architecture has been designed to accommodate PWM frequencies up to 200 kHz with maximum bus voltage utilisation, enabling low inductance motor control. Communication options include EtherCAT, CANopen, and SPI.
{kind=link}
{kind=link}
{kind=link}
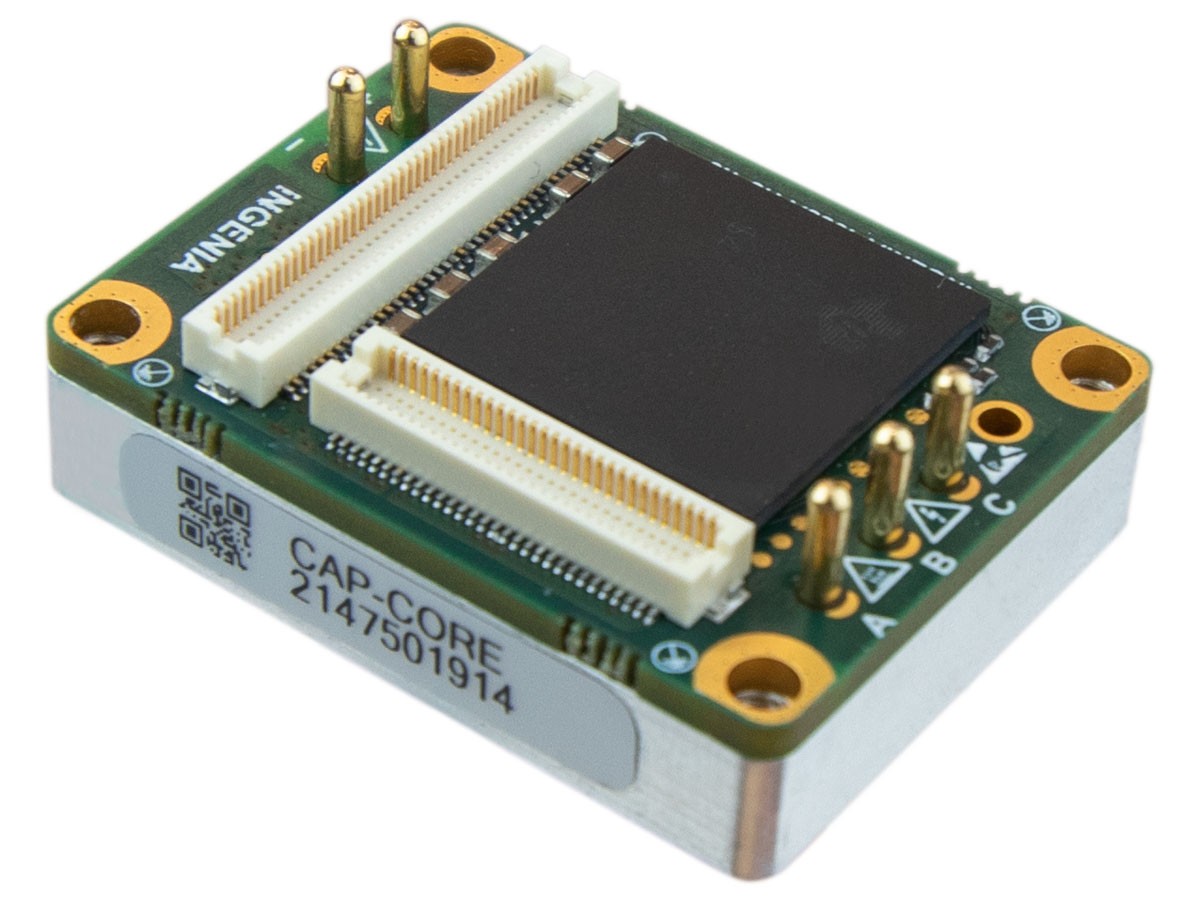
CAPITAN CORE

Plug 'n' Play
Ultra-low profile servo drive in a pluggable design for direct control via SPI communication interface for optimised EtherCAT / CANopen multi-axis architectures
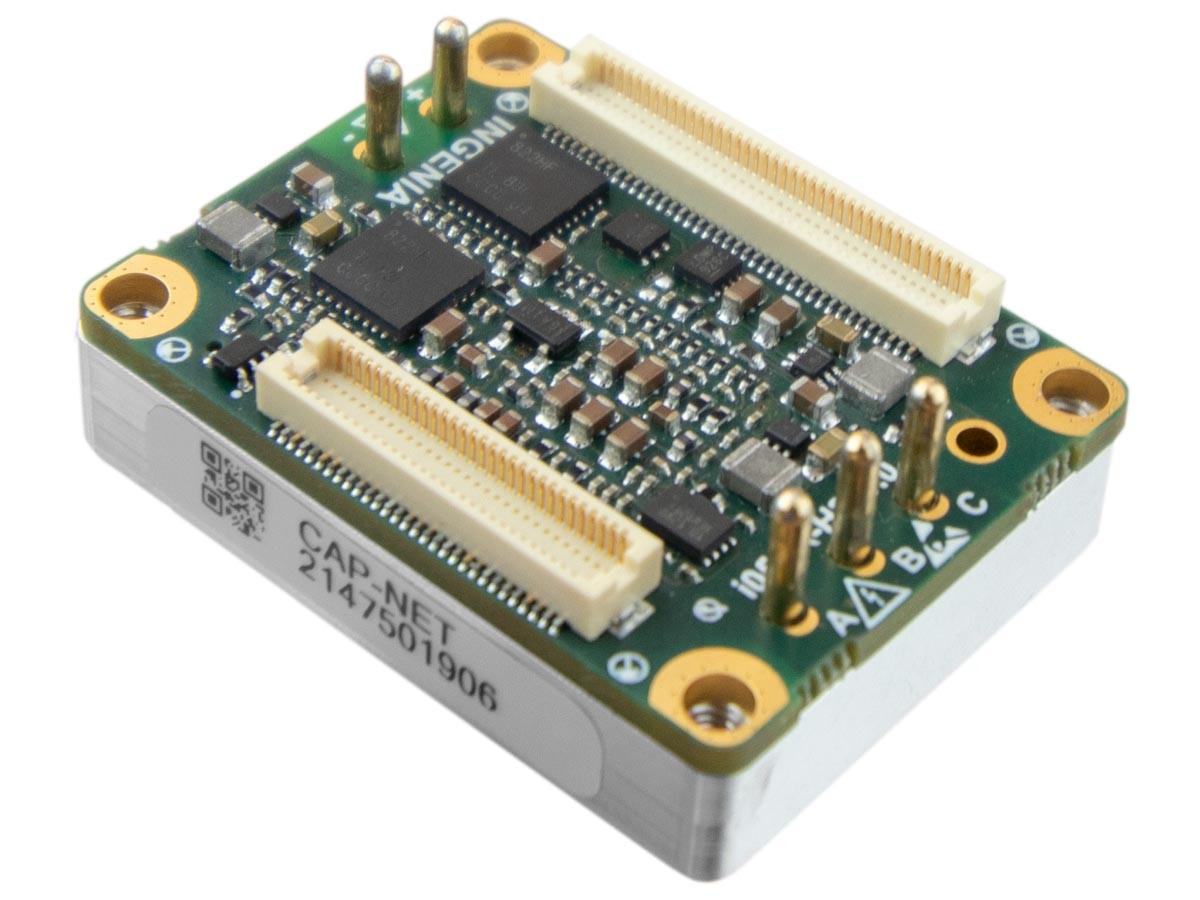
CAPITAN NET

PCB Mount
PCB mountable unit with system-level communications ready to go
(EtherCAT and CANopen); Plug-in design for single or multi-axis applications
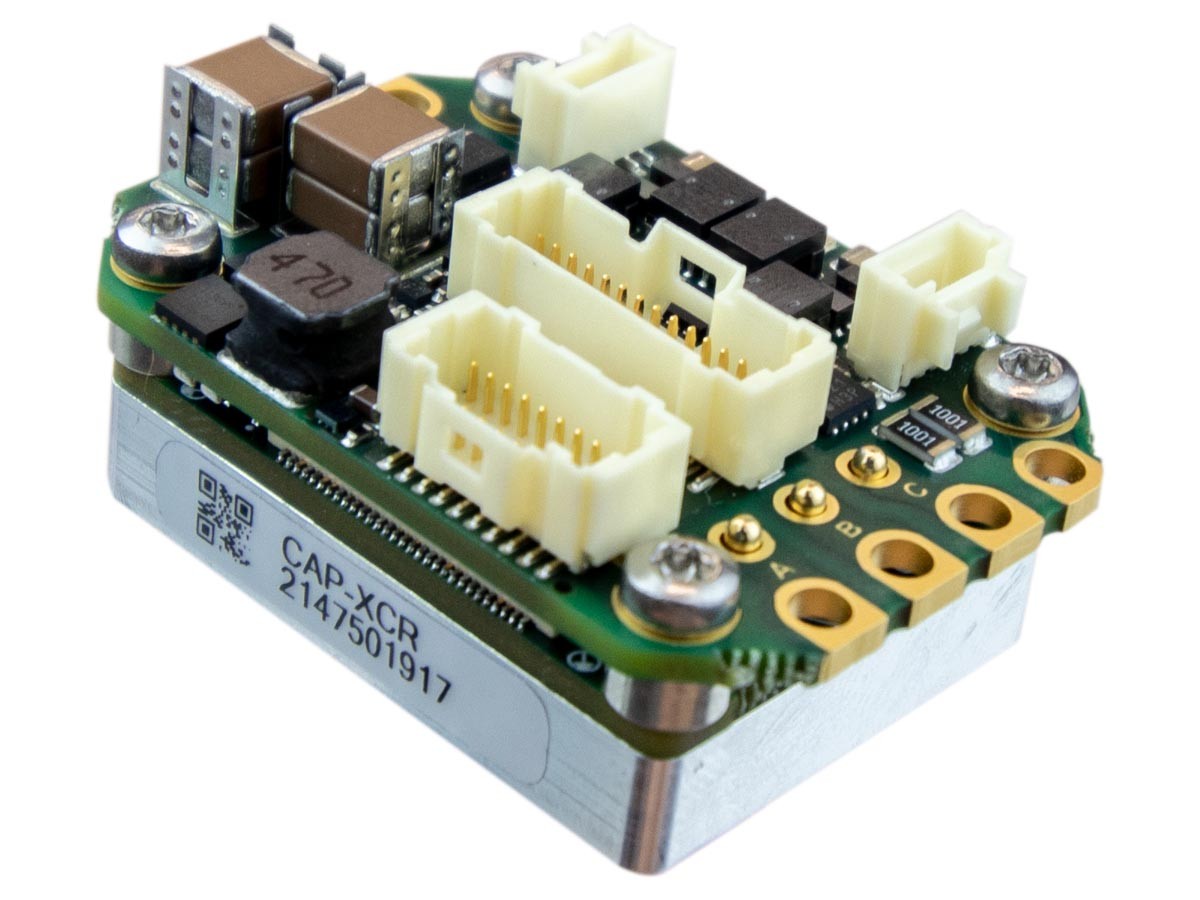
CAPITAN XCR
Panel Mount
Ready to go connectors for rapid and easy commissioning and development.
(EtherCAT and CANopen)
Technical Data
| Continuous Current | 10A |
|---|---|
| Peak Current | 20A |
| Supply Voltage | Power: 8-60VDC Logic: 8-50VDC |
| Efficiency | 99% |
| Standby Power Consumption | 1.12W - 2.1W |
| PWM Switching Frequency | 20kHz, 50kHz, 100kHz, 200kHz |
| Communications | XCR / NET: CANopen, EtherCAT CORE: SPI bus |
| Feedback | Digital Halls, Digital Incremental Encoder, BiSS-C, Dual Biss-C, Biss-C Daisy Chain, SSI |
| Support Motor Type | DC Brushed, Rotary Brushless |
| Dimensions | CORE / NET: 34.5 mm x26 mm x10.3 mm XCR: 42 mm x 29 mm x 19.4 mm |
| Weight | CORE / NET: 18g XCR: 28g |
| Motion Mode | Profile Position, Profile Speed, Profile Torque, Homing, Cyclic Sync Position, Cyclic Sync Velocity, Cyclic Sync Torque, |
| Environment | Industrial, High Temperature, Low Temperature |
| Inputs / Outputs | 4x5 V Single Ended Digital Input 4x5 V Single Ended Digital Output 1x5 V Differential Analogue Input 16 bits* (* XCR: 1x -10 ..10 V Differential Analogue Input 16 bits) |
| Part Number | CAP-XCR CAP-NET CAP-CORE |
Main Features
- Super-flat design and lightweight
- Ultra-low standby power consumption
- PWM frequency up to 200 kHz for low inductance motors
- Extremely fast servo loops for smooth operation
- Minimum communication latency
- Dual loop support for unparalleled precision
- EtherCAT / CANopen versions available
- SPI communications interface for optimised multi-axis architectures
- Highest efficiency up to 99%
- Functional safety STO SIL3 Ple
Application Highlights
Exoskeletons

Surgical Robotics
AGVs
Ready to find out more? Contact us for a quote.
Please contact our technical sales team for pricing, datasheets, technical drawings (2D / 3D), hardware & software manuals or any other technical information for your applications...